本网讯 7月17日,第十九届全国大学生智能汽车竞赛华南赛区比赛在海南大学圆满落幕。代表我校电子系T307智能车实验室的“广软二队”、“广软三队”、“广软四队”、“广软五队”、“出门捡到钱”和“呆呆队”在指导老师孙伟老师和陈华珍老师的带领下参赛,在竞争最激烈的华南赛区120所高校525支队伍中获得了华南赛区优胜奖一项、华南赛区三等奖三项和华南赛区二等奖两项的佳绩。

团队合照
获奖证书
赛事介绍
全国大学生智能汽车竞赛作为国家教育部十八项重要赛事之一,也是全国大学生课外学术科技A1类赛事。全国大学生智能汽车竞赛自2006年首届举办以来,今年已是第十九届,参赛学生总规模超过了35万人次,学生收获和竞赛声誉保持高位。该比赛以时间和速度为标准,被参赛选手称为是最具有公平竞争性的比赛。第十九届全国大学生智能车竞赛总共有615所高校的2945支队伍参加了分(省)赛区的竞速类十个项目的比赛,包括清华大学、哈尔滨工业大学、同济大学、北京科技大学、武汉大学、中国计量大学、暨南大学、华南理工大学等等的985、211院校的参赛队伍,可谓是群英荟萃、高手云集。
相比于往年,今年又引入了许多新平台的芯片,例如气垫组别要使用南京沁恒微电子的CH32系列芯片、越野组别要使用英飞凌公司的CYT4BB7芯片等。由于新平台的引入,使得今年的竞赛充满了不确定性与挑战。
摩托车的平衡原理有了比较大的改变,但依然可以继续沿用串级PID的核心算法,几乎所有平衡类小车模型都可以使用串级PID来实现非常不错的平衡效果。串级PID的核心思想就是上一级PID的输出作为下一级PID输入,其中有三个pid闭环,包括最外的角速度环、中间的角度环以及最内的角速度环(从左往右),其整体闭环看起来就像是串着的一样,使平衡具有了较强的抗干扰性;气垫组不是轮式结构,其本身是一个大惯性模型,通过陀螺仪模块来增加船模转向的稳定性以及防止弯道飘移,在此前提下能够进行准确识别元素和自主完成寻轨,更具考验算法的鲁棒性。越野组作为实验室拓新组别,克服前所未有的经验下,需要处理声音和GPS的融合,实现快、准、稳来完成比赛任务。
今年比赛整体难度增大,开发周期长,开发难度大。队伍选手从自行设计PCB电路开始到编写软件算法代码再到调试算法参数,使得车模能够以最快的速度完成对应的任务要求。
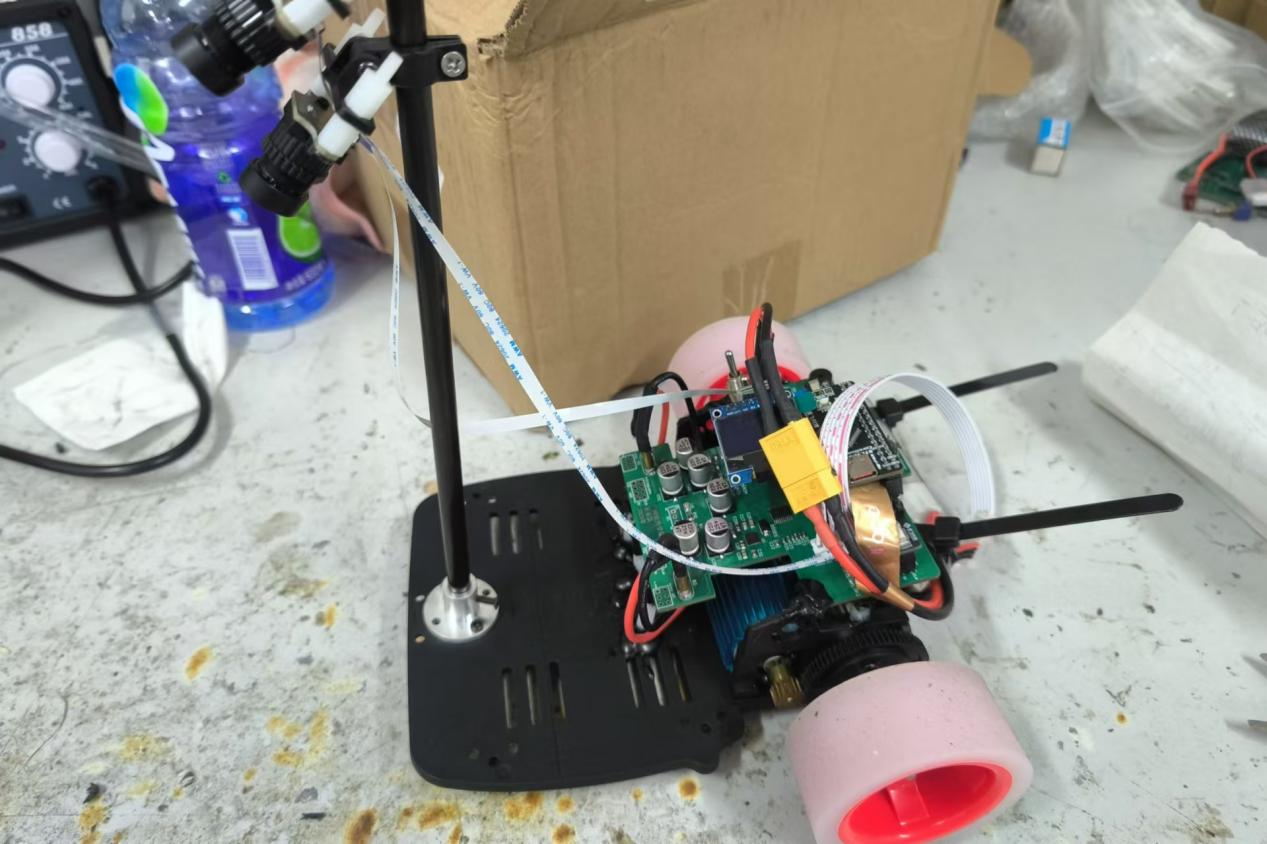
车模展示

镜头组(Infineon)
镜头组(STC)

摩托组
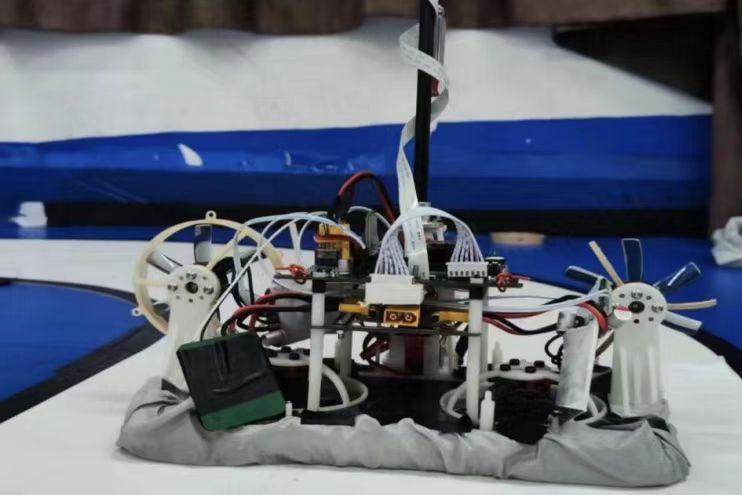
气垫组
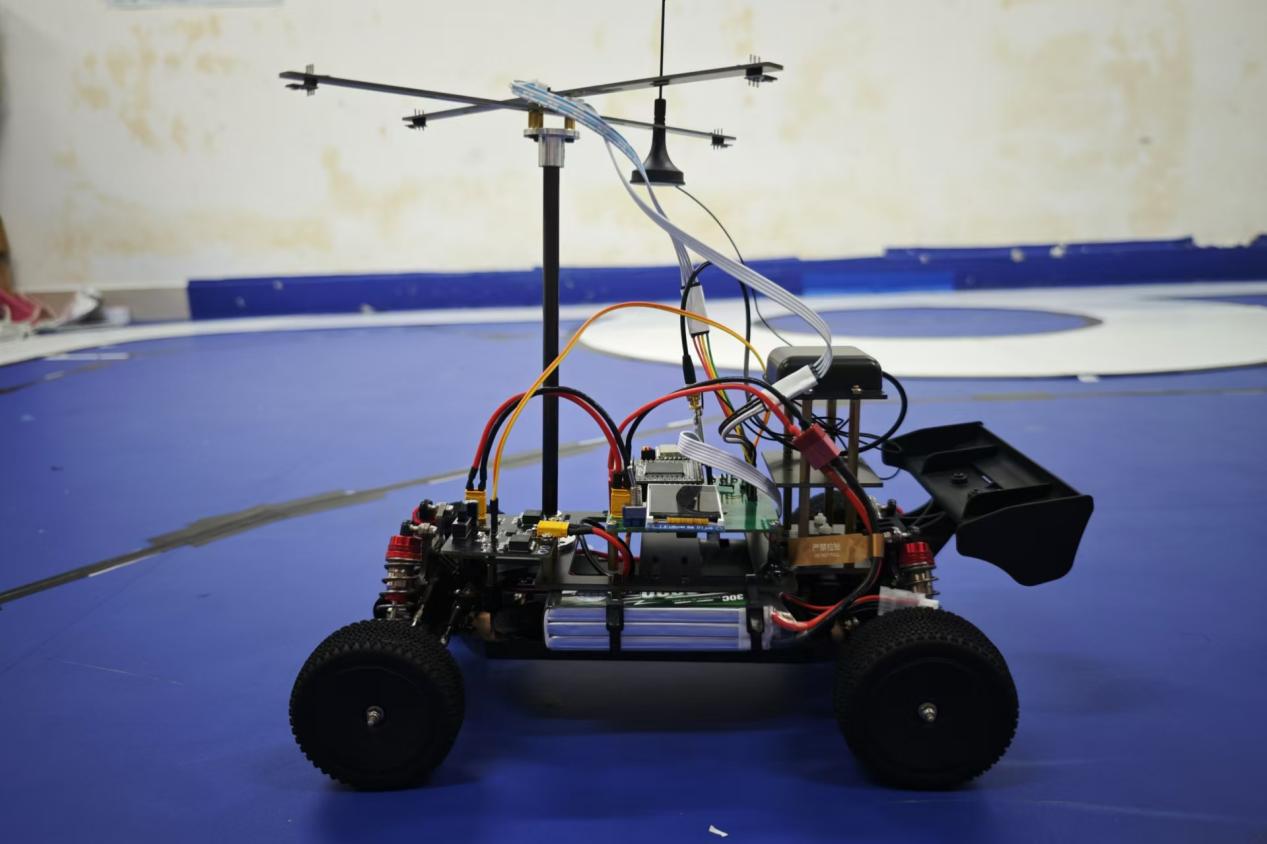
越野组

电磁组
供稿:T307实验室 王远平
